
Electronic stuff:
The 12V power supply 47A
the DPS-600bp model is 30 € with shipping: 575W The mod is very light! ad here
There is not need to open the block and therefore no risk of electric shock.
Cards: Arduino and MotoMonster:
here, the wiring diagram drawn by Lipide512
Arduino /..Motomonster1
……GND <-> GND pin
……..5V <-> 5V
…..pin 4 <-> pin 4 inA motor1
…..pin 5 <-> pin 5 pwm1
…..pin 6 <-> pin 6 pwm2
…..pin 7 <-> pin 7 inA motor2
…..pin 8 <-> pin 8 inB motor1
…..pin 9 <-> pin 9 inB motor2

I choose not to stack the two cards although it is expected to:
– I wanted to keep me a chance to reallocate the outputs of the Arduino
– I wanted better cooling system (so I raised the motomonster)
a video to show the amplitudes of movement of the cockpit and the moving speed.
The position commands are typed by hand in the arduino serial monitor (RF7LF7 then RAELFF etc …)
[youtube]http://www.youtube.com/watch?v=_2JYek-4IMo[/youtube]
Heat sinker had to be cut in half in order to have a good contact with the 2 chips (uneven)

go for the thermal paste

spreading the paste:

Protection for cables :
-> electrical conduit
-> A notch

-> And insert in the hole!

the cover of the electronic cards with his fan
a grid that prevents the wires to be worn against the blades.

overview:


Arduino configuration :
PC1 : Games
windows seven
IP fixe : 192.168.0.11 (TCP/IP v4 protocol)
this PC runs the games
and SimTools GameEngine
PC2 : Simu
windows seven
IP fixe : 192.168.0.4 (TCP/IP v4 protocol)
this PC runs SimTools GamaManager
and communicates with Arduino via USB serial cable.
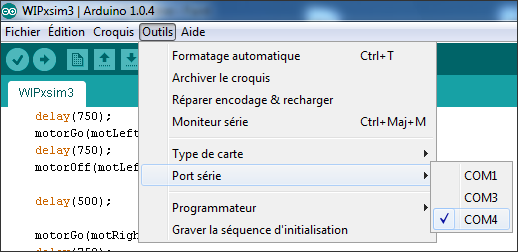
*/ Arduino : install manually the drivers (see the Arduino’s documentation for Windows Seven installation).
After complete installation, find in the Windows system on which COM Port it has been installed : you will need to put this information in SimTools interface.

Double clic on Arduino’s line and adjust the default speed :

In the Arduino plateform, put the right COM Port : if not, you won’t be able to upload your program into the Arduino…
If you need to lead some communication tests, use the Serial Monitor („magnifying lens“ on top right ).
Adjust here as well the same default speed :

Arduino 2DOF code
You can download the code within the text file in the resources section!
Items to buy
– irreversible truck wiper motors 12N.m 24V : 2×35€ + 16€ shipping
SWF VALEO NIDEC ITT 404.458 motoréducteur 24V DC
– Arduino board : 25€ + shipping
– MotoMonster board (16V max) :
70€ @ Sparkfun
27$ @ DX
– server PSU 12V 47A (575W) DSP600 : 35€ on eBay
– 2x potentiometers : 2×7€ + shipping
you can buy any cermet potentiometer : „cermet“ means Ceramic Metal.
It guarantees you that it’s the strongest design compared to plastic-carbon low cost pot.
– cermet
– linear (not logarithmic)
– 10 kOhm
I bought mine at http://www.gotronic.fr/art-potentiometre-lineaire-cermet-10k-8486-11293.htm
you can find here many other electronic distributors :
Weight
+ my plateform structure weight 8,6 kg
tube 30x20x1,5 (1,1 kg/m) 5,4m : 5,9 kg
tube 16x16x1,5 (0,7 kg/m) 4,1m : 2,7 kg
+ rally tube seat : 9 kg
+ rally harness : 1 kg
+ logitech MOMO wheel and pedals : 4,5 kg
+ buttkicker 1 kg
subtotal : 25 kg
+ driver !
grand total : 100 kg which is heavy and has great inertia in mouvements !
-> so keep in mind to build light
Electrical power consumption
[gard]
I measured the power with this wattmeter : [album]1961[/album]
PC#1 Games : 80 to 100W
PC#2 notebook : 30 to 45W
Dolby 5.1 : 15W
Power supply PSU : in IA mode rfactor which sakes a lot ! between 170W and 220W (depending on the parameters in Arduino code: max speed and amplitude)
the PSU efficientcy is 81%, hence it gives 180W to the motors.
-> 90W per motor -> 7,5 A in 12V DC